Controlador de Ruta
1. Introducción
El control de ruta es quizás la dependencia menos creativa, en comparación con Aproximación o Torre.
Su trabajo consiste en gestionar el tráfico IFR incorporándose y/o saliéndose de la aerovía o de la FRA y en crucero; junto con posibles tráficos VFR, la mayoría de veces a la escucha en frecuencia. La principal dificultad estriba en la coordinación de tráficos subiendo y descendiendo en un mismo sector; y la secuenciación en las llegadas normalizadas, antesalas de la secuencia final impuesta por aproximación. La coordinación con las dependencias inferiores es esencial para que las transferencias sean fluidas y la secuencia acompasada.
Los otros objetivos de los controladores de área son:
-
Brindar a las aeronaves el asesoramiento y la información necesarios para la conducción segura y eficiente de los vuelos.
-
Notificar a los involucrados en la búsqueda y rescate de aeronaves que necesiten este servicio y asistirlos en las tareas.
Debe entenderse claramente que la provisión del servicio de alerta no es una función aislada, sino que está incorporada en la provisión de información de vuelo y servicio ATC.
2. Servicios radar
Los sistemas de radar utilizados por las dependencias ATC se emplean para proporcionar tres “servicios radar”:
-
Asistencia radar, destinada a proporcionar información a la aeronave sobre su posición y cualquier desviación de su ruta.
-
Vigilancia radar, destinada a proporcionar información al ATC sobre la posición, velocidad y altitud de todas las aeronaves para asegurar su separación.
-
Guiado vectorial, destinada a emitir rumbos con el fin de proporcionar orientación de navegación a la aeronave.
Estos servicios solo se pueden proporcionar a aeronaves que estén “identificadas por radar”.
Además, algunas dependencias ATC solo pueden proporcionar parte de estos servicios dependiendo de las prestaciones del radar y de la configuración de su espacio aéreo.
2.1. Asistencia radar
La asistencia de radar proporciona información a la aeronave sobre cualquier desviación de las autorizaciones que han recibido y para ayudar a todas las aeronaves en condiciones de paneo o socorro (emergencias).
2.2. Vigilancia radar
La vigilancia radar verifica que:
-
La separación del radar está por encima de los mínimos o la separación operativa.
-
La posición de la aeronave es compatible cuando el tráfico vuela cerca de otras aeronaves.
-
Se proporciona información sobre el tráfico no controlado.
-
No hay desviación de las autorizaciones emitidas dentro de la tolerancia.
2.3. Guiado vectorial
La guía vectorial radar se utiliza para:
-
Brindar seguridad a todas las aeronaves y una separación mínima de vuelo.
-
Optimizar las trayectorias de vuelo.
-
Garantizar una gestión eficiente del tráfico.
3. Parámetros de regulación en ruta
Después de la seguridad, la regulación en ruta es la tarea principal del controlador en ruta.
La regulación consta principalmente de:
-
Garantizar la seguridad del tráfico en todo momento.
-
Mantener una separación óptima entre todas las aeronaves.
-
Crear y optimizar los flujos de tráfico.
La regulación en ruta implica las siguientes acciones:
-
Garantizar la seguridad manteniendo una separación adecuada por encima del mínimo.
-
Acortar las rutas de los aviones al aeropuerto de destino para reducir el tiempo de vuelo manteniendo un flujo de tráfico eficiente.
-
Regular la velocidad de todas las aeronaves en el mismo flujo de tráfico.
-
Organizar los flujos de tráfico para evitar la congestión del aeropuerto.
-
Manejar aviones de adelantamiento, descenso, ascenso y cruce alrededor de los mismos niveles.
La regulación en ruta resolverá todas las posibles situaciones de conflicto antes de que se establezca una pérdida de separación.
3.1. Gestión del nivel de vuelo de crucero
El controlador de ruta es responsable de todos los niveles de vuelo de la aeronave bajo su control.
Sin embargo, cuando no pueda asignar el nivel de vuelo solicitado, el controlador debe:
-
Asignar un nivel de crucero lo más cercano posible al solicitado.
-
Negociar un nuevo nivel de vuelo en función de las prestaciones de la aeronave.
3.2. Gestión de la paridad en la ruta
Por razones de seguridad, el controlador de ruta debe garantizar el respeto de la paridad del nivel de vuelo de acuerdo con las reglas semicirculares o las restricciones publicadas en las cartas en ruta (que tienen prioridad sobre las reglas semicirculares).
Siempre que una aeronave ingrese a una zona controlada con un nivel de vuelo incorrecto según la paridad de ruta, se debe autorizar un cambio de nivel de vuelo, aunque el piloto no lo haya solicitado.
Una correcta gestión de las paridades de nivel de vuelo en la fase en ruta es la forma más eficaz de evitar posibles conflictos. Si la paridad de la ruta no se publica o la ruta está fuera de las vías aéreas publicadas, la paridad debe asignarse de acuerdo con las reglas semicirculares estándar, basadas en la división de la ruta Norte/Sur.
3.3. Gestión de la velocidad de crucero
La velocidad es un parámetro muy importante en la regulación en ruta.
La velocidad de una aeronave volando a FL260 o superior debe regularse utilizando la velocidad MACH (el límite puede variar entre FL245 y FL325 dependiendo de las condiciones meteorológicas).
Si dos aviones vuelan usando:
- Misma IAS: el avión que vuela al nivel más alto volará más rápido que el otro.
- Mismo MACH: el avión que vuela al nivel más bajo volará más rápido que el otro.
3.4. Separación mínima en ruta con control radar
El respeto de las mínimas de separación es obligatorio.
Los mínimos de separación en ruta cuando el ATC utiliza radar son:
-
5 NM horizontalmente o,
-
1000 pies verticalmente por debajo de FL290 o,
-
1000 pies verticalmente en el espacio aéreo RVSM entre FL290 y FL410 o,
-
2000 pies verticalmente en espacio aéreo no RVSM entre FL290 y FL410 o,
-
2000 pies verticalmente en y por encima de FL410
La separación operativa mínima sugerida durante el crucero entre dos aeronaves que vuelan al mismo nivel y a lo largo de la misma ruta o rutas paralelas a menos de 10 millas náuticas es de 15 millas náuticas con el uso de un sistema de radar.
La separación operacional mínima sugerida entre dos aeronaves en un reglamento de secuencia previa de aproximación dentro de la zona del controlador de área de responsabilidad del mismo IAF es de 10 millas náuticas.
4. Aerovías (rutas ATS)
La identificación de rutas ATS se realiza para hacer referencia inequívoca a cualquier ruta ATS sin necesidad de describirla.
El designador de ruta ATS constará de:
-
Un prefijo (opcional).
-
Una letra.
-
Un número.
-
Una letra adicional (opcional).
La selección del prefijo (opcional) se hará entre las que se enumeran en la siguiente tabla:
| Letra | Descripción |
|---|---|
| K | Para indicar una ruta de bajo nivel establecida para ser utilizada principalmente por helicópteros. |
| U | Para indicar la ruta o parte de la misma que se establece en el espacio aéreo superior. |
| S | Para indicar una ruta para uso exclusivo de aeronaves supersónicas durante la aceleración, desaceleración y durante el vuelo supersónico.. |
Cuando se utilicen los prefijos K, U o S, en las comunicaciones de voz se hablarán de la siguiente manera:
K: Kopter
U: Upper
S: Supersonic
La selección de la letra se hará entre las que se enumeran en la siguiente tabla:
| Letra | Descripción |
|---|---|
| A, B, G o R | Rutas que forman parte de las redes regionales de rutas ATS y no son rutas de navegación de área. |
| L, M, N o P | Rutas para navegación de área que forman parte de las redes regionales de rutas ATS. |
| H, J, V o W | Rutas que no forman parte de las redes regionales de rutas ATS y no son rutas de navegación de área |
| Q, T, Y o Z | Rutas para navegación de área que no forman parte de las redes regionales de rutas ATS |
Cuando lo prescriban las autoridades ATS o los acuerdos regionales, se puede agregar una letra suplementaria después del designador básico de la ruta ATS para indicar el tipo de servicio prestado:
| Letra | Descripción |
|---|---|
| F | Para indicar que el servicio de asesoramiento solo se proporciona en la ruta o parte de la misma. |
| G | Para indicar que el servicio de información de vuelo solo se proporciona en la ruta o parte de la misma. |
Las rutas ATS del espacio aéreo español están recogidas en el AIP (ENR 3.1 Rutas ATS inferiores y ENR 3.3 Rutas de navegación aérea) y están todas recopiladas y de fácil consulta en la herramienta AEROVÍAS.
5. Espacio aéreo “free route”
El objetivo del espacio aéreo “free route” (FRA) es el de prescindir de las limitaciones impuestas por las aerovías y llevar a cabo una optimización del espacio aéreo, contribuyendo a una mejora de la capacidad, flexibilidad y eficiencia de vuelo de los tráficos entrantes en sus límites.
España, proyecto se denomina HispaFRA, y se definen dos zonas afectadas: la "Celda Canarias" que es UIR Canarias por encima de FL305, y la "Celda Continental", compuesta por UIR Madrid y UIR Barcelona, por encima de FL245.
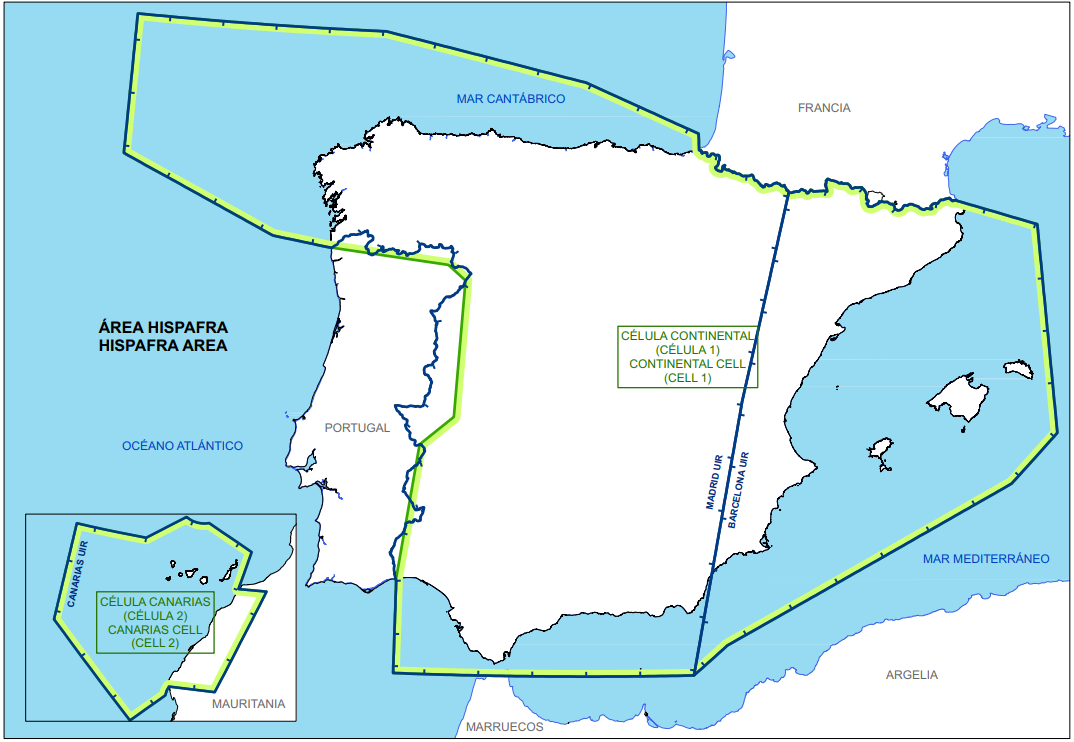
El encaminamiento libre permite a las aeronaves volar por rutas más óptimas y por tanto se prevé que supondrá un ahorro importante en tiempo de vuelo, costes de combustible, emisiones de CO2, etc.
En la fase inicial, vigente a partir del 21 de abril de 2022, los cambios son muy leves:
-
Se mantiene la red de aerovías en todo espacio aéreo.
-
Se definen puntos de relevancia FRA y se permite formar planes de vuelo mediante DCT siguiendo las reglas, pero ajustándose a las trayectorias de las aerovías.
- Sin cambios en la operativa ATC.
¡¡IMPORTANTE!!: En este espacio aéreo, coexistirán las rutas ATS (aerovías) y el FRA (Espacio Aéreo Free Route).
El libre encaminamiento total, sin restricciones, se espera cumplir para diciembre de 2025.
5.1. Definiciones
-
Espacio aéreo Free Route o de encaminamiento libre (FRA): Espacio donde se puede planificar una ruta libremente entre puntos definidos sin usar aerovías.
-
Punto de Entrada (E): Fijo en el límite del espacio Free Route desde el cual se permiten operaciones FRA.
-
Punto de Salida (X): Fijo en el límite del espacio Free Route hacia el cual se permiten operaciones FRA.
-
Punto Intermedio (I): Fijo o radioayuda a través del cual se permiten operaciones FRA.
-
Punto de conectividad de Arribada (A): Fijo o radioayuda para el tráfico de llegada a aeródromos específicos.
-
Punto de conectividad de Despegue (D): Fijo o radioayuda para el tráfico de salida desde aeródromos específicos.
-
DCT o Directo: Conexión directa de dos puntos FRA.
5.2. Puntos FRA
Solo se permiten DCT entre puntos FRA definidos en AIP ENR 4.1/ENR 4.4. Un mismo punto FRA puede combinar varios descriptores, por ejemplo “ASTRO (IAD)”. En Aurora se diferenciarán los tipos de fijo mediante su símbolo:
-
Puntos FRA de Entrada, Salida o Intermedios (triángulo hueco):
-
Puntos FRA de Arribada o Despegue (rombo hueco):
-
Puntos no FRA (triángulo relleno):

5.3. Sobrevuelos
Todos los sobrevuelos que vayan a utilizar FRA, deberán usar un Punto de Entrada (E) y un Punto de Salida (X) válidos (conectados mediante tramos “DCT”), pudiendo utilizar Puntos Intermedios (I) con el objetivo de optimizar su perfil, indicar un cambio de nivel de vuelo, reglas de vuelo o de velocidad, etc.
De acuerdo con el Doc. ICAO 4444, la distancia entre puntos consecutivos deber ser inferior a 200 NM o 30 minutos de vuelo, i.e. ANETO DCT MLA DCT VLC DCT HAMRA.
La planificación de tramos “DCT” que crucen la frontera no está permitida.
El empleo de puntos intermedios FRA no publicados, definidos por coordenadas geográficas o por rumbo y distancia en el FPL ÍTEM 15, está prohibido.
5.4. Despegues y arribadas de aeropuertos en FRA
Todos los vuelos que vayan a utilizar FRA y lleguen a un aeropuerto en FIR Madrid, Barcelona o Canarias, deberán conectar su punto de Punto de Entrada (E) con un punto Punto de conectividad de Arribada (X) (pudiendo usar Puntos Intermedios).
Todos los vuelos que vayan a utilizar FRA y salgan de un aeropuerto en FIR Madrid, Barcelona o Canarias, deberán conectar su punto de Punto de conectividad de Despegue (D) con un punto Punto de Salida (X) (pudiendo usar Puntos Intermedios).
Estos vuelos pueden utilizar DCT a pesar de que una pequeña parte de su trayectoria, durante el ascenso o descenso, esté por debajo del límite inferior del FRA.
5.5. Nivel de crucero
Se deberá respetar la Regla Semicircular de Niveles de Vuelo:
-
NORTE : De 270º a 089º (PAR)
-
SUR : De 090º a 269º (IMPAR)
Sobre esta regla, tiene prioridad la paridad de Nivel de Vuelo cada Punto de Entrada (E) y Punto de Salida (X), publicada en ENR 4.1/ENR 4.4.
En caso de cambio de nivel de crucero que resulte en una transición hacia/desde FRA, el punto de transición entre el área HispaFRA y la red de rutas ATS debe ser un Punto Intermedio FRA (I) publicado en AIP ENR 4.1. y ENR 4.4.
i.e. ANETO DCT MLA DCT VLC/N0300F230 UP34 HAMRA
5.6. Documento de Disponibilidad de Rutas (RAD)
En este documento, EuroControl publica todas las limitaciones, excepciones y restricciones sobre HispaFRA realizadas por motivos operativos, control de flujo de tránsito, etc.
Durante la fase inicial de HispaFRA en operaciones reales, aunque se podrán planificar tramos directos en lugar de aerovías, el RAD no permitirá rutas cuya trayectoria nominal sea diferente de la permitida antes de HispaFRA, es decir, si no coinciden con aerovías. En la simulación de vuelo, se prevé que las aplicaciones de planificación como Simbrief incorporen las rutas FRA válidas según esta condición, igual que en otros espacios Free Route europeos.
Enlace al RAD: https://www.nm.eurocontrol.int/RAD/
Enlace al validador de planes de vuelo: https://www.public.nm.eurocontrol.int/PUBPORTAL/gateway/spec/index.html
En IVAO, NO es obligatorio que los pilotos cumplan las restricciones de este documento, aunque es recomendable que sigan la trayectoria de las aerovías. Los controladores NO deben comprobar la validez de la ruta de cada tránsito.
6. RVSM (Reduced Vertical Separation Minimum)
Debido a la reducción en la precisión de los altímetros barométricos al aumentar la altitud, fue necesario establecer un aumento de la separación vertical mínima (VSM) por encima de un cierto nivel de vuelo (FL). Así para aeronaves con FL inferior a 290 se establece una VSM de 300 m (1000 pies), mientras que si el nivel de vuelo es superior a 290 esta separación mínima se aumenta a 600 m (2000 pies).
Así, la separación vertical mínima (VSM) en el espacio aéreo es:
-
300 m o 1000 pies por debajo de FL 290.
-
600 m o 2000 pies por encima de FL 290.

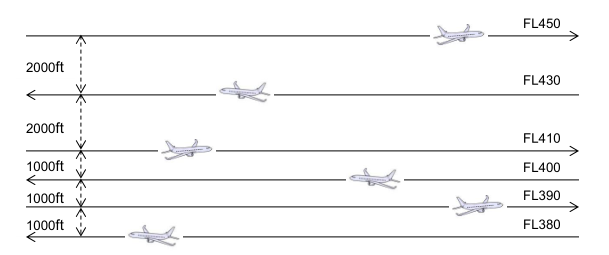
Con el objetivo de aumentar la capacidad del espacio aéreo por encima de FL290, se creó, sobre la base de un acuerdo regional, el espacio RVSM (separación vertical mínima reducida). Este RVSM consiste en la reducción del mínimo de separación vertical a 300 m o 1000 pies entre FL290 y FL410:
-
300 m o 1000 pies por debajo de FL410.
-
600 m o 2000 pies por encima de FL410.
La tripulación de vuelo indica la aprobación RVSM mediante la presentación de una “W” en el campo 10 del plan de vuelo modelo de la OACI.
El espacio RVSM está implantado en todo Europa desde el año 2005.
-
Dos sistemas de medición de altitud independientes (altímetros) que utilicen sensores de presión independientes.
-
Un sistema de alerta de desviación de altitud.
-
Un piloto automático equipado con una función de mantenimiento de altitud.
-
Un transpondedor de radar de vigilancia secundario (SSR) con informes de altitud sincronizados con el altímetro como fuente del piloto automático.
Dentro del espacio aéreo RVSM, la separación vertical mínima es de 2000 pies (600 m) entre las aeronaves no RVSM y cualquier otra aeronave que opere dentro del espacio aéreo RVSM.
7. Oceánico
El control oceánico consiste en mantener la separación requerida dentro de un área de control oceánico mediante el uso de los informes de posición.
El controlador de ruta de oceánico también deberá aprobar/denegar todas las peticiones de cambios de altitud y/o cambios de velocidad.
7.1. Frecuencia Radio
Todas las comunicaciones tienen lugar en HF. Sin embargo, desafortunadamente IVAO no puede simular esto, por lo tanto, usamos frecuencias VHF, pero las pronunciamos de otra manera. 133.00 se convierte en 13300 kHz (uno tres tres cero cero kilohercios).
7.2. Separaciones antes de entrar
Es responsabilidad conjunta entre FIRs asegurar que los tráficos, si obtienen restricciones por el controlador Oceánico antes de entrar, que los tráficos las acatan, ya que se podría acabar con una pérdida de separación en caso contrario.
Como norma general, la separación lateral mínima será 185 km (100 NM) salvo que se aplique lo dispuesto en los siguientes puntos.
Para los vuelos por rutas oceánicas controladas designadas o en áreas comprendidas dentro de las FIR Canarias (sector meridional), las FIR Dakar Oceanic, Recife y Sal Oceanic, y en rutas designadas sobre África continental, puede aplicarse una separación lateral mínima de 93 km (50 NM).
Con excepción de lo dispuesto en el punto destacado inferior* , la separación longitudinal mínima entre aeronaves de turborreactor será:
-
De 20 minutos, salvo en los casos que se especifican a continuación;
-
De 15 minutos al FL 250 o por encima del mismo dentro de las FIR Canarias, Dakar Oceanic, Recife y Sal Oceanic, siempre que se aplique la técnica del número de Mach y que, si se trata de vuelos horizontales, de ascenso o de descenso, las aeronaves hayan notificado su paso por el mismo punto de entrada a las rutas ATS o por un punto de entrada común al espacio
aéreo oceánico controlado y sigan la misma derrota o derrotas continuamente divergentes; o
-
de 10 minutos o 150 km (80 NM), obtenida mediante RNAV, cuando se aplica la técnica del número de Mach en rutas oceánicas RNP 10 designadas y controladas en el corredor EUR/SAM dentro de las FIR Dakar Oceanic, Recife y Sal Oceanic; o
-
de 10 minutos cuando se aplique la técnica del número de Mach en rutas RNP 10 designadas sobre África continental.
*La separación longitudinal mínima será 93 km (50 NM) obtenida mediante RNAV entre aeronaves en el corredor EUR/SAM que satisfagan las disposiciones de RNAV (RNP10).
Las velocidades de Mach se utilizan para separar aeronaves en el espacio aéreo oceánico. Los aviones que vuelan sobre la misma ruta y nivel podrán ser separados utilizando la técnica de numero de Mach, de la siguiente forma:
-
Rápidos seguidos por lento - Por cada disminución de 0,02 Mach, se puede restar 1 minuto de la entrada oceánica (el mínimo es de 5 minutos).
-
Por ejemplo. M0.84 seguido por M0.80, requiere un mínimo de ocho minutos de separación a la entrada del océano mismo nivel misma ruta.
-
-
Lento seguido de Rápido - Por cada incremento de 0,01 Mach es necesario agregar 1 minuto al tiempo para que pueda entrar en el espacio aéreo oceánico.
-
Por ejemplo. M0.80 seguido de M0.84 requiere CATORCE minutos.
-
Las velocidades de Mach son monitorizadas durante el vuelo y ajustadas según sea necesario para asegurar la separación. Esta es una técnica usada en entornos de radar y es esencial para el control oceánico.