Velocidades de referencia
1. Aeronaves
La prueba práctica del rango SPP se realiza con una aeronave bimotor de clase CS23 según la certificación de EASA. En concreto, bimotores propulsados por hélices o turbohélices con un MTOW de 8618 kg.
Debido a su diseño y potencia necesaria, estas aeronaves presentan peculiaridades de controlabilidad en caso de fallo de uno de sus dos motores. En este training aprenderás lo necesario para operar estas aeronaves de forma segura tanto en situación normales y de emergencia.
2. Prestaciones y rendimiento
La performance de una aeronave puede traducirse al español como el “rendimiento” de la misma.
Igual que en los monomotores y en cualquier tipo de aeronave, lo siguiente afecta a la misma:
-
Condiciones del aeródromo: elevación, pendiente de la pista, contaminación de la pista…
-
Condiciones meteorológicas: temperatura exterior, presión atmosférica, precipitación, viento en superficie…
-
Condiciones de la aeronave: peso bruto (GW), posición del Centro de Gravedad, configuración de flaps, configuración de sistemas auxiliares como el aire sangrado (bleed), aire acondicionado (packs), protección contra lluvia y hielo (anti-ice), frenos anti bloqueo (anti-skid)…
3. Motor crítico y velocidades de referencia asociadas
En la explicación, a continuación, imagina el avión visto desde arriba, con el morro hacia delante.
3.1 Fuerzas generadas por los motores
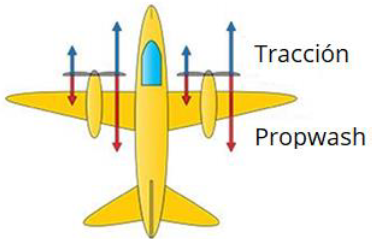
Cada motor genera:
-
Fuerza, conocida como tracción, a través de las palas que giran en función de la potencia seleccionada. En condiciones normales, la tracción de los dos motores se suma para producir una fuerza total que actúa en sentido longitudinal (generalmente hacia delante, excepto en caso de reversa).
-
Una corriente de aire acelerada inmediatamente detrás del motor (propeller wash o propwash) que pasa por la superficie alar detrás del mismo, también llegando al elevador y timón dirección. Esta corriente de aire tendrá mayor velocidad cuanta más tracción se produzca.
Un motor parado en vuelo genera resistencia adicional, sobre todo si no está abanderado, ya que la corriente de aire incidiendo sobre la hélice haría girar a la misma, pero sin producir prácticamente ninguna tracción, a lo que se le llama “efecto molinillo” o windmilling.
Es importante abanderar un motor inoperativo para reducir su resistencia al mínimo posible. La resistencia es mínima cuando el motor está abanderado con la hélice parada.
3.2 Factor P
En motores de hélice, cada pala produce tracción diferente en cada punto de su ciclo de barrido. La pala descendente incide con un ángulo de ataque mayor en la corriente de aire, por lo que se produce mayor tracción mientras la pala está descendiendo. Esto produce que el punto de aplicación de la tracción total resultante de cada motor no sea en centro del mismo (buje), sino un punto determinado en las palas descendientes. A este desplazamiento de la tracción total generada por una hélice se le llama “factor P” o P-factor.
Por tanto, viendo el motor desde arriba:
• Si las palas giran en sentido horario: el punto de aplicación estará a la derecha del buje. Este es el caso de la siguiente imagen.
• Si las palas giran en sentido antihorario: el punto de aplicación estará a la izquierda del buje.
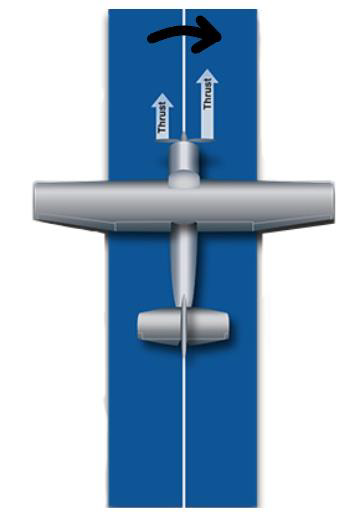
3.3 Momento combinado de la tracción de cada motor
Por definición, el Centro de Gravedad es el punto en el que actúan todas las fuerzas del avión. La fuerza de tracción producida por cada motor no se encuentra en el centro de gravedad, sino a una distancia del mismo. Esa distancia al CG, también llamada brazo/arm, multiplicada por la fuerza de tracción generada por el motor recibe el nombre de “momento” de tracción.
El momento generado por cada motor es realmente un momento que produce un giro sobre el CG. Contra más alejado del CG esté la fuerza de aplicación, mayor será el momento para la misma fuerza. Los dos motores producen una fuerza de la misma magnitud, uno a cada lado del eje longitudinal. En condiciones normales, los momentos de giro de ambos se anulan y la resultante es un momento hacia delante, anulándose el momento de giro sobre el CG.
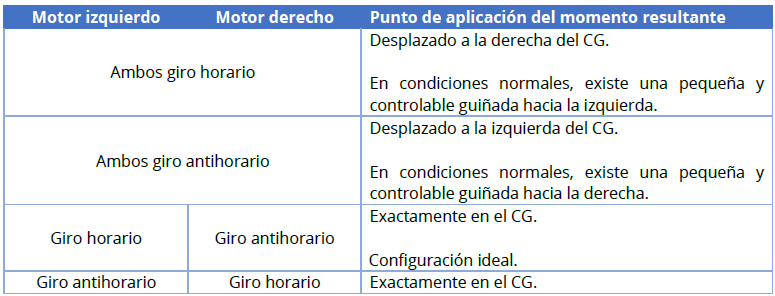
En la siguiente tabla puede verse cómo afecta la dirección de rotación de los motores en el desplazamiento del momento de tracción resultante de ambos respecto al CG.
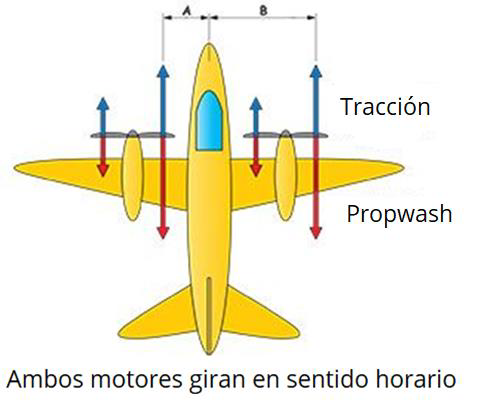
En la siguiente imagen puede verse el esquema de fuerzas en un bimotor con dos motores que giran en sentido horario. Puede verse que:
-
La fuerza generada por la pala que baja es mayor que la generada por la pala que sube.
-
Aunque los dos motores generen la misma fuerza, porque son idénticos:
-
El motor izquierdo genera un momento igual a la fuerza por la distancia “A”.
-
El motor derecho genera un momento igual a la fuerza por la distancia “B”.
-
El momento generado por el motor derecho es mayor que el izquierdo, ya que B es mayor que A. (La tracción resultante del motor derecho se aplica más lejos del CG que la del motor izquierdo.)
-
-
Mientras los dos motores estén funcionando existirá un pequeño y casi despreciable momento de guiñado hacia la izquierda debido a la diferencia de momentos.
3.4 Fallo de motor
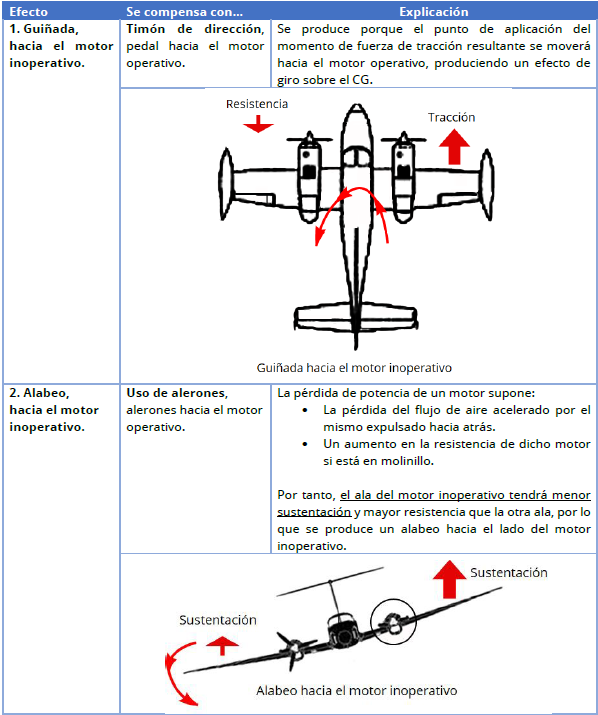
En caso de una pérdida de potencia o fallo de motor, el motor afectado generará menos tracción que el otro motor. Esto hará que el punto de aplicación del momento resultante de la tracción de los dos motores cambie, por lo que se producen dos efectos:
3.5 Motor crítico
El motor crítico es aquel que, en caso de fallo, afectará de manera más adversa al control de la aeronave, es decir, en la situación que requiere una mayor corrección con las superficies de control (alerones y timón de dirección).
El motor crítico se determina teniendo en cuenta qué motor de los dos genera el menor momento de tracción. A misma tracción en cada motor, la única forma de que el momento varíe es que varíe la distancia del CG a la fuerza de tracción. El motor que más cerca del CG haga la fuerza es el motor crítico porque si falla, el otro motor hará su fuerza a más distancia del CG, generando un mayor momento de tracción y, por tanto, se necesitará mayor deflexión de los controles de vuelo para compensarlo.
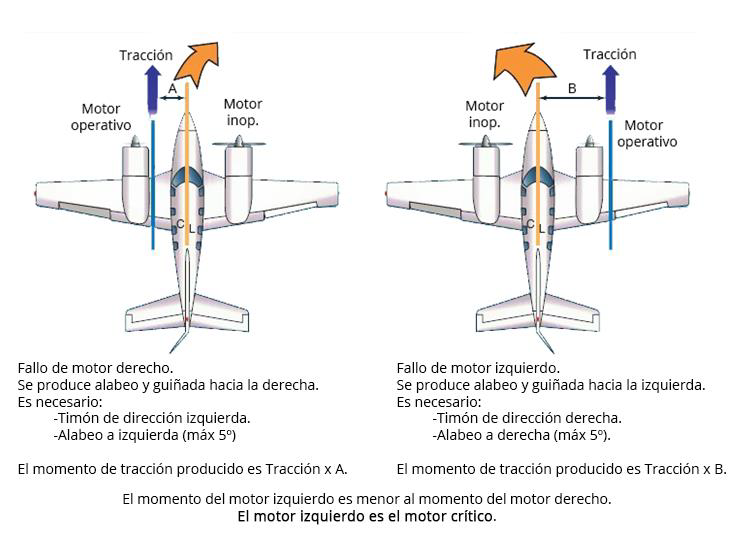
En la imagen a continuación se muestra una aeronave con dos motores que giran en sentido horario. Se puede comprobar que, en este caso:
-
Los dos motores son idénticos y, por tanto, producen la misma tracción.
-
El motor izquierdo produce su tracción a una distancia menor al CG que el motor derecho, por tanto, producirá un momento de tracción menor que el motor derecho.
-
El motor izquierdo es el crítico, ya que, si falla, el motor derecho producirá un mayor momento de tracción que en el caso contrario, dejando a la aeronave en una situación más adversa y necesitando mayor corrección con las superficies de control.
En la siguiente tabla puede verse cómo afecta el giro de cada motor en la determinación del motor crítico. Para ciertas configuraciones no existe motor crítico ya que ambos producen el mismo momento de fuerza de tracción, dejando a la aeronave en la misma condición aerodinámica en caso de fallo.

La performance de las aeronaves se basa siempre en el fallo del motor crítico, si lo hay, ya que es el motor que en peor situación deja a la aeronave. Las limitaciones y velocidades del avión se determinan también considerando que, en caso de fallo de motor, falla el crítico y el operativo se mantiene en potencia máxima continua.
3.6 Velocidades de referencia asociadas al vuelo con un motor fallado
Como se ha explicado anteriormente, es necesario contrarrestar el efecto adverso en la controlabilidad que presenta un fallo de motor.
La certificación de las aeronaves considera que el efecto adverso se compensa utilizando únicamente los controles de vuelo cuya máxima deflexión puedan garantizar que la aeronave es controlable y maniobrable, quedando el motor operativo a máxima potencia continua, es decir, generando el mayor momento de tracción adverso posible.
La capacidad de los controles de vuelo para ejercer una determinada fuerza depende de la velocidad aerodinámica (CAS), es decir, la cantidad de aire que esté pasando por los controles. Es por esto que se necesitan establecer velocidades mínimas de control.
Estas son las velocidades de referencia para performance con fallo de motor, de menor a mayor:
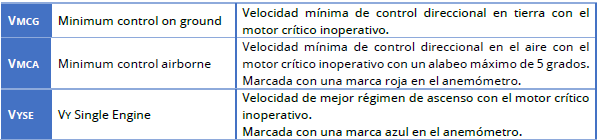
Para entender mejor el concepto de VMCG y VMCA, por debajo de estas velocidades los controles de vuelo no recibirían el flujo de aire necesario para generar una fuerza suficiente que contrarreste la guiñada y alabeo ocasionados por el fallo de uno de los motores, teniendo el motor operativo a máxima potencia continua.
Ejemplos prácticos:
-
Fallo de motor en carrera de despegue antes de VMCG: el control direccional no es posible a través de superficies de control. Es necesario reducir la potencia del motor operativo para recuperar el control de la aeronave.
-
Fallo de motor en carrera de despegue después de VMCG y antes de VMCA: el control direccional es posible a través de las superficies de control durante la carrera de despegue. No obstante, es necesario acelerar hasta la VMCA antes de rotar para que el avión sea controlable en el aire.
-
Fallo de motor en carrera de despegue después de VMCA: el control direccional es posible a través de las superficies de control. En el aire, la velocidad debe mantenerse por encima de Vmca mientras el motor operativo esté en máxima potencia continua. Siempre que sea posible es recomendable ascender a VYSE.
-
Fallo de motor en ascenso por encima de VYSE: Decelerar a VYSE para conseguir el mejor régimen de ascenso.
-
Fallo de motor con los motores a ralentí o baja potencia por debajo de VMCA: el control direccional en este momento es posible a través de las superficies de control, pero puede no serlo si se aumenta la potencia del motor operativo. Antes de aplicar la máxima potencia continua en el motor operativo, acelerar por encima de VMCA.
-
Pérdida con potencia: La velocidad de pérdida es inferior a VMCA por lo que, tras el fallo de motor, será necesario reducir la potencia del motor operativo lo suficiente para mantener el control direccional durante la aceleración a VMCA. Por encima de VMCA se podrá aumentar la potencia a la máxima continua en el motor operativo manteniendo el control de la aeronave.
4. Velocidades de referencia
A continuación, se presentan las velocidades de referencia más comunes, también llamadas V-Speeds, ya que todas empiezan por V. La lista está ordenada de menor a mayor velocidad.
Existen más velocidades que aplican a aeronaves de transporte con un MTOW más alto que no son necesarias para la certificación de las aeronaves a las que se hace referencia en este documento.
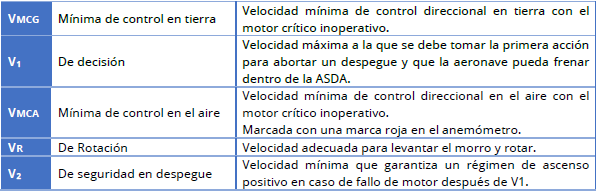
4.1 Velocidades de referencia - Despegue
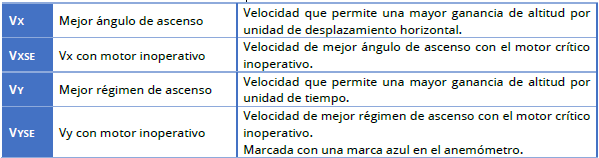
4.2 VELOCIDADES DE REFERENCIA – ASCENSO
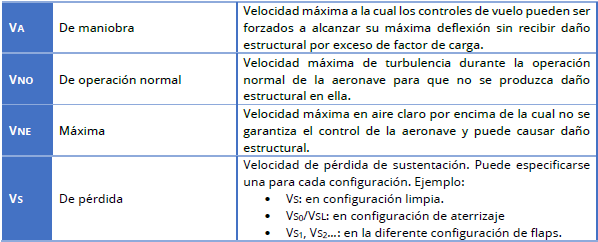
4.3 Velocidades de referencia - Velocidades de diseño
4.4 Velocidades de referencia - Aproximación
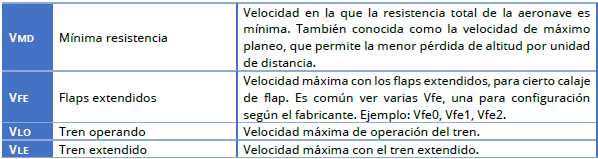
4.5 Velocidades de referencia - Aterrizaje

4.6 Velocidades de referencia - Representación clásica en el instrumento

Este es un anemómetro comúnmente encontrado en este tipo de aeronaves. En él se distingue:
- VYSE con una marca azul, para tener una referencia rápida sobre qué velocidad volar en caso de fallo de motor.
- VMCA con una marca roja.
- Arco blanco: desde VSL hasta VFE.
- Arco verde: desde VS hasta VNO.
- Arco amarillo: desde VNO hasta VNE.
- VNE con una marca roja.